Building Advanced AI
The AI we have right now can kick some ass, but it is too dumb for any seasoned gamer to compete with. This is the list of current flaws:
- It does not navigate well, gets stuck among trees or somewhere near water.
- It is not aware of powerups.
- It could do better job at shooting.
- It’s field of vision is too small, compared to player’s, who is equipped with radar.
We will tackle these issues in current chapter.
Improving Tank Navigation
Tanks shouldn’t behave like Roombas, randomly driving around and bumping into things. They could be navigating like this:
- Consult with current AI state and find or update destination point.
- If destination has changed, calculate shortest path to destination.
- Move along the calculated path.
- Repeat.
If this looks easy, let me assure you, it would probably require rewriting the majority of AI and
Map code we have at this point, and it is pretty tricky to implement with procedurally generated
maps, because normally you would use a map editor to set up waypoints, navigation mesh or other
hints for AI so it doesn’t get stuck. Sometimes it is better to have something working imperfectly
over a perfect solution that never happens, thus we will use simple things that will make as much
impact as possible without rewriting half of the code.
Generating Friendlier Maps
One of main reasons why tanks get stuck is bad placement of spawn points. They don’t take trees and
boxes into account, so enemy tank can spawn in the middle of a forest, with no chance of getting
out without blowing things up. A simple fix would be to consult with ObjectPool before placing a
spawn point only where there are no other game objects around in, say, 150 pixel radius:
class Map
# ...
def find_spawn_point
while true
x = rand(0..MAP_WIDTH * TILE_SIZE)
y = rand(0..MAP_HEIGHT * TILE_SIZE)
if can_move_to?(x, y) &&
@object_pool.nearby_point(x, y, 150).empty?
return [x, y]
end
end
end
# ...
end
How about powerups? They can also spawn in the middle of a forest, and while tanks are not seeking them yet, we will be implementing this behavior, and leading tanks into wilderness of trees is not the best idea ever. Let’s fix it too:
class Map
# ...
def generate_powerups
pups = 0
target_pups = rand(20..30)
while pups < target_pups do
x = rand(0..MAP_WIDTH * TILE_SIZE)
y = rand(0..MAP_HEIGHT * TILE_SIZE)
if tile_at(x, y) != @water &&
@object_pool.nearby_point(x, y, 150).empty?
random_powerup.new(@object_pool, x, y)
pups += 1
end
end
end
# ...
end
We could also reduce tree count, but that would make the map look worse, so we are going to keep this in our pocket as a mean of last resort.
Implementing Demo State To Observe AI
Probably the best way to figure out if our AI is any good is to target one of AI tanks with our
game camera and see how it plays. It will give us a great visual testing tool that will allow
tweaking AI settings and seeing if they perform better or worse. For that we will introduce
DemoState where only AI tanks will be present in the map, and we will be able to switch camera
from one tank to another.
DemoState is very similar to PlayState, the main difference is that there is no player. We will
extract create_tanks method that will be overridden in DemoState.
class PlayState < GameState
attr_accessor :update_interval, :object_pool, :tank
def initialize
# ...
@camera = Camera.new
@object_pool.camera = @camera
create_tanks(4)
end
# ...
private
def create_tanks(amount)
@map.spawn_points(amount * 3)
@tank = Tank.new(@object_pool,
PlayerInput.new('Player', @camera, @object_pool))
amount.times do |i|
Tank.new(@object_pool, AiInput.new(
@names.random, @object_pool))
end
@camera.target = @tank
@hud = HUD.new(@object_pool, @tank)
end
# ...
end
We will also want to display a smaller version of score in top-right corner of the screen, so let’s
add some adjustments to ScoreDisplay:
class ScoreDisplay
def initialize(object_pool, font_size=30)
@font_size = font_size
# ...
end
def create_stats_image(stats)
# ...
@stats_image = Gosu::Image.from_text(
$window, text, Utils.main_font, @font_size)
end
# ...
def draw_top_right
@stats_image.draw(
$window.width - @stats_image.width - 20,
20,
1000)
end
end
And here is the extended DemoState:
13-advanced-ai/game_states/demo_state.rb
1 class DemoState < PlayState
2 attr_accessor :tank
3
4 def enter
5 # Prevent reactivating HUD
6 end
7
8 def update
9 super
10 @score_display = ScoreDisplay.new(
11 object_pool, 20)
12 end
13
14 def draw
15 super
16 @score_display.draw_top_right
17 end
18
19 def button_down(id)
20 super
21 if id == Gosu::KbSpace
22 target_tank = @tanks.reject do |t|
23 t == @camera.target
24 end.sample
25 switch_to_tank(target_tank)
26 end
27 end
28
29 private
30
31 def create_tanks(amount)
32 @map.spawn_points(amount * 3)
33 @tanks = []
34 amount.times do |i|
35 @tanks << Tank.new(@object_pool, AiInput.new(
36 @names.random, @object_pool))
37 end
38 target_tank = @tanks.sample
39 @hud = HUD.new(@object_pool, target_tank)
40 @hud.active = false
41 switch_to_tank(target_tank)
42 end
43
44 def switch_to_tank(tank)
45 @camera.target = tank
46 @hud.player = tank
47 self.tank = tank
48 end
49 end
To have a possibility to enter DemoState, we need to change MenuState a little:
class MenuState < GameState
# ...
def update
text = "Q: Quit\nN: New Game\nD: Demo"
# ...
end
# ...
def button_down(id)
# ...
if id == Gosu::KbD
@play_state = DemoState.new
GameState.switch(@play_state)
end
end
end
Now, main menu has the option to enter demo state:
Overhauled main menu

Observing AI in demo state
Visual AI Debugging
After watching AI behavior in demo mode for a while, I was terrified. When playing game normally, you usually see tanks in “fighting” state, which works pretty well, but when tanks go roaming, it’s a complete disaster. They get stuck easily, they don’t go too far from the original location, they wait too much.
Some things could be improved just by changing wait_time, turn_time and drive_time to
different values, but we certainly have to do bigger changes than that.
On the other hand, “observe AI in action, tweak, repeat” cycle proved to be very effective, I will definitely use this technique in all my future games.
To make visual debugging easier, build yourself some tooling. One way to do it is to have global
$debug variable which you can toggle by pressing some button:
class PlayState < GameState
# ...
def button_down(id)
# ...
if id == Gosu::KbF1
$debug = !$debug
end
# ...
end
# ...
end
Then add extra drawing instructions to your objects and their components. For example, this will
make Tank display it’s current TankMotionState implementation class beneath it:
class TankMotionFSM
# ...
def set_state(state)
# ...
if $debug
@image = Gosu::Image.from_text(
$window, state.class.to_s,
Gosu.default_font_name, 18)
end
end
# ...
def draw(viewport)
if $debug
@image && @image.draw(
@object.x - @image.width / 2,
@object.y + @object.graphics.height / 2 -
@image.height, 100)
end
end
# ...
end
To mark tank’s desired gun angle as blue line and actual gun angle as red line, you can do this:
class AiGun
# ...
def draw(viewport)
if $debug
color = Gosu::Color::BLUE
x, y = @object.x, @object.y
t_x, t_y = Utils.point_at_distance(x, y, @desired_gun_angle,
BulletPhysics::MAX_DIST)
$window.draw_line(x, y, color, t_x, t_y, color, 1001)
color = Gosu::Color::RED
t_x, t_y = Utils.point_at_distance(x, y, @object.gun_angle,
BulletPhysics::MAX_DIST)
$window.draw_line(x, y, color, t_x, t_y, color, 1000)
end
end
# ...
end
Finally, you can automatically mark collision box corners on your graphics components. Let’s take
BoxGraphics for example:
# 13-advanced-ai/misc/utils.rb
module Utils
# ...
def self.mark_corners(box)
i = 0
box.each_slice(2) do |x, y|
color = DEBUG_COLORS[i]
$window.draw_triangle(
x - 3, y - 3, color,
x, y, color,
x + 3, y - 3, color,
100)
i = (i + 1) % 4
end
end
# ...
end
# 13-advanced-ai/entities/components/box_graphics.rb
class BoxGraphics < Component
# ..
def draw(viewport)
@box.draw_rot(x, y, 0, object.angle)
Utils.mark_corners(object.box) if $debug
end
# ...
end
As a developer, you can make yourself see nearly everything you want, make use of it.
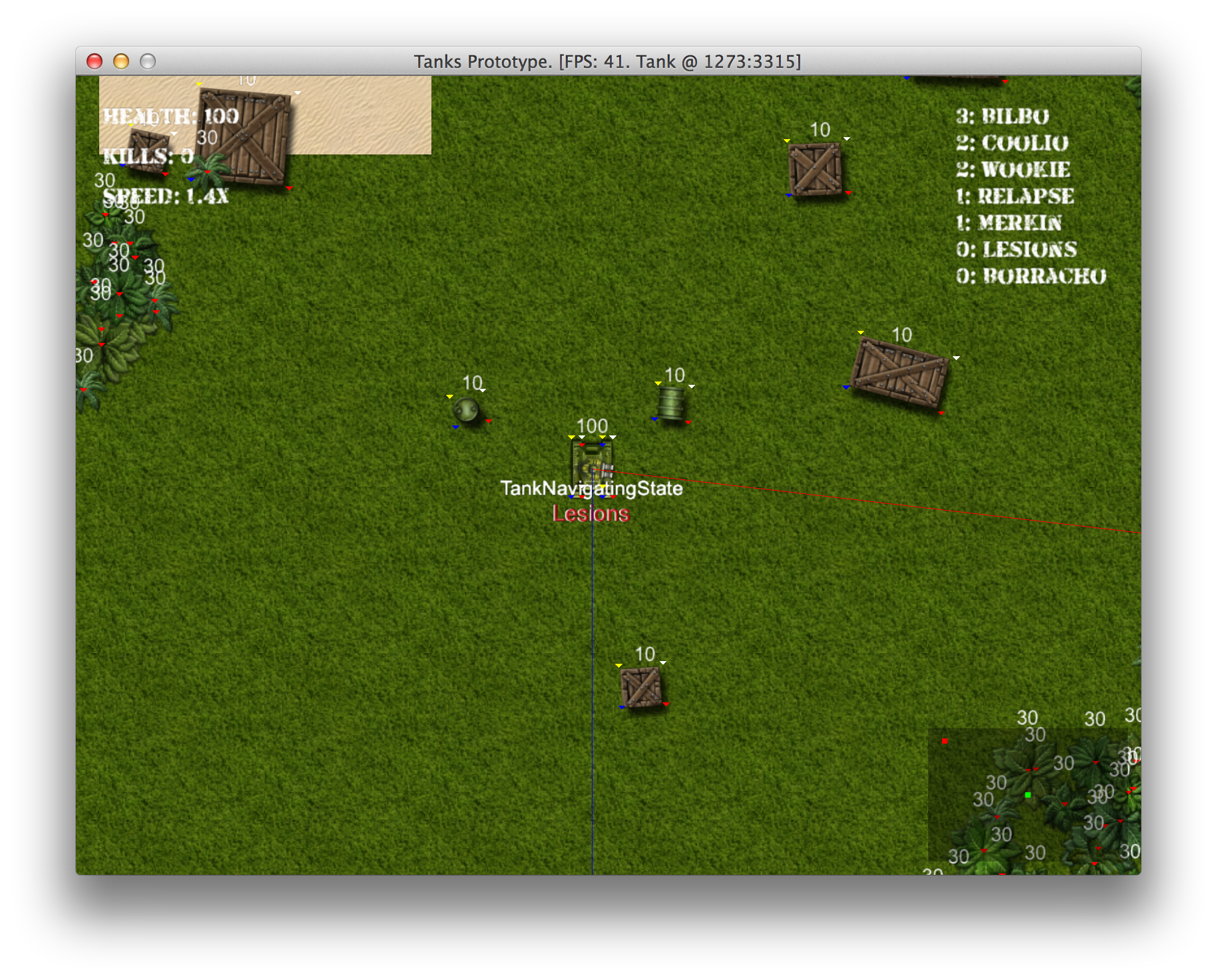
Visual debugging of AI behavior
Although it hurts the framerate a little, it is very useful when building not only AI, but the
rest of the game too. Using this visual debugging together with Demo mode, you can tweak all the AI
values to make it shoot more often, fight better, and be more agile. We won’t go through this
minor tuning, but you can find the changes by viewing changes introduced in 13-advanced-ai.
Making AI Collect Powerups
To even out the odds, we have to make AI seek powerups when they are required. The logic behind it can be implemented using a couple of simple steps:
- AI would know what powerups are currently needed. This may vary from state to state, i.e. speed and fire rate powerups are nice to have when roaming, but not that important when fleeing after taking heavy damage. And we don’t want AI to waste time and collect speed powerups when speed modifier is already maxed out.
-
AiVisionwould return closest visible powerup, filtered by acceptable powerup types. - Some
TankMotionStateimplementation would adjust tank direction towards closest visible powerup inchange_directionmethod.
Finding Powerups In Sight
To implement changes in AiVision, we will introduce closest_powerup method. It will query
objects in sight and filter them out by their class and distance.
class AiVision
# ...
POWERUP_CACHE_TIMEOUT = 50
# ...
def closest_powerup(*suitable)
now = Gosu.milliseconds
@closest_powerup = nil
if now - (@powerup_cache_updated_at ||= 0) > POWERUP_CACHE_TIMEOUT
@closest_powerup = nil
@powerup_cache_updated_at = now
end
@closest_powerup ||= find_closest_powerup(*suitable)
end
private
def find_closest_powerup(*suitable)
if suitable.empty?
suitable = [FireRatePowerup,
HealthPowerup,
RepairPowerup,
TankSpeedPowerup]
end
@in_sight.select do |o|
suitable.include?(o.class)
end.sort do |a, b|
x, y = @viewer.x, @viewer.y
d1 = Utils.distance_between(x, y, a.x, a.y)
d2 = Utils.distance_between(x, y, b.x, b.y)
d1 <=> d2
end.first
end
# ...
end
It is very similar to AiVision#closest_tank, and parts should probably be extracted to keep the
code dry, but we will not bother.
Seeking Powerups While Roaming
Roaming is when most picking should happen, because Tank sees no enemies in sight and needs to
prepare for upcoming battles. Let’s see how can we implement this behavior while leveraging the
newly made AiVision#closest_powerup:
class TankRoamingState < TankMotionState
# ...
def required_powerups
required = []
health = @object.health.health
if @object.fire_rate_modifier < 2 && health > 50
required << FireRatePowerup
end
if @object.speed_modifier < 1.5 && health > 50
required << TankSpeedPowerup
end
if health < 100
required << RepairPowerup
end
if health < 190
required << HealthPowerup
end
required
end
def change_direction
closest_powerup = @vision.closest_powerup(
*required_powerups)
if closest_powerup
@seeking_powerup = true
angle = Utils.angle_between(
@object.x, @object.y,
closest_powerup.x, closest_powerup.y)
@object.physics.change_direction(
angle - angle % 45)
else
@seeking_powerup = false
# ... choose random direction
end
@changed_direction_at = Gosu.milliseconds
@will_keep_direction_for = turn_time
end
# ...
def turn_time
if @seeking_powerup
rand(100..300)
else
rand(1000..3000)
end
end
end
It is simple as that, and our AI tanks are now getting buffed on their spare time.
Seeking Health Powerups After Heavy Damage
To seek health when damaged, we need to change TankFleeingState#change_direction:
class TankFleeingState < TankMotionState
# ...
def change_direction
closest_powerup = @vision.closest_powerup(
RepairPowerup, HealthPowerup)
if closest_powerup
angle = Utils.angle_between(
@object.x, @object.y,
closest_powerup.x, closest_powerup.y)
@object.physics.change_direction(
angle - angle % 45)
else
# ... reverse from enemy
end
@changed_direction_at = Gosu.milliseconds
@will_keep_direction_for = turn_time
end
# ...
end
This small change tells AI to pick up health while fleeing. The interesting part is that when tank
picks up RepairPowerup, it’s health gets fully restored and AI should switch back to
TankFightingState. This simple thing is a major improvement in AI behavior.
Evading Collisions And Getting Unstuck
While observing AI navigation, it was noticeable that tanks often got stuck, even in simple
situations, like driving into a tree and hitting it repeatedly for a dozen of seconds. To reduce
the number of such occasions, we will introduce TankNavigatingState, which would help avoid
collisions, and TankStuckState, which would be responsible for driving out of dead ends as
quickly as possible.
To implement these states, we need to have a way to tell if tank can go forward and a way of
getting a direction which is not blocked by other objects. Let’s add a couple of methods to
AiVision:
class AiVision
# ...
def can_go_forward?
in_front = Utils.point_at_distance(
*@viewer.location, @viewer.direction, 40)
@object_pool.map.can_move_to?(*in_front) &&
@object_pool.nearby_point(*in_front, 40, @viewer)
.reject { |o| o.is_a? Powerup }.empty?
end
def closest_free_path(away_from = nil)
paths = []
5.times do |i|
if paths.any?
return farthest_from(paths, away_from)
end
radius = 55 - i * 5
range_x = range_y = [-radius, 0, radius]
range_x.shuffle.each do |x|
range_y.shuffle.each do |y|
x = @viewer.x + x
y = @viewer.y + y
if @object_pool.map.can_move_to?(x, y) &&
@object_pool.nearby_point(x, y, radius, @viewer)
.reject { |o| o.is_a? Powerup }.empty?
if away_from
paths << [x, y]
else
return [x, y]
end
end
end
end
end
false
end
alias :closest_free_path_away_from :closest_free_path
# ...
private
def farthest_from(paths, away_from)
paths.sort do |p1, p2|
Utils.distance_between(*p1, *away_from) <=>
Utils.distance_between(*p2, *away_from)
end.first
end
# ...
end
AiVision#can_go_forward? tells if tank can move ahead, and AiVision#closest_free_path finds a
point where tank can move without obstacles. You can also call
AiVision#closest_free_path_away_from and provide coordinates you are trying to get away from.
We will use closest_free_path methods in newly implemented tank motion states, and
can_go_forward? in TankMotionFSM, to make a decision when to jump into navigating or stuck
state.
Those new states are nothing fancy:
13-advanced-ai/entities/components/ai/tank_navigating_state.rb
1 class TankNavigatingState < TankMotionState
2 def initialize(object, vision)
3 @object = object
4 @vision = vision
5 end
6
7 def update
8 change_direction if should_change_direction?
9 drive
10 end
11
12 def change_direction
13 closest_free_path = @vision.closest_free_path
14 if closest_free_path
15 @object.physics.change_direction(
16 Utils.angle_between(
17 @object.x, @object.y, *closest_free_path))
18 end
19 @changed_direction_at = Gosu.milliseconds
20 @will_keep_direction_for = turn_time
21 end
22
23 def wait_time
24 rand(10..100)
25 end
26
27 def drive_time
28 rand(1000..2000)
29 end
30
31 def turn_time
32 rand(300..1000)
33 end
34 end
TankNavigatingState simply chooses a random free path, changes direction to it and keeps driving.
13-advanced-ai/entities/components/ai/tank_stuck_state.rb
1 class TankNavigatingState < TankMotionState
2 def initialize(object, vision)
3 @object = object
4 @vision = vision
5 end
6
7 def update
8 change_direction if should_change_direction?
9 drive
10 end
11
12 def change_direction
13 closest_free_path = @vision.closest_free_path
14 if closest_free_path
15 @object.physics.change_direction(
16 Utils.angle_between(
17 @object.x, @object.y, *closest_free_path))
18 end
19 @changed_direction_at = Gosu.milliseconds
20 @will_keep_direction_for = turn_time
21 end
22
23 def wait_time
24 rand(10..100)
25 end
26
27 def drive_time
28 rand(1000..2000)
29 end
30
31 def turn_time
32 rand(300..1000)
33 end
34 end
TankStuckState is nearly the same, but it keeps driving away from @stuck_at point, which is set
by TankMotionFSM upon transition to this state.
class TankMotionFSM
STATE_CHANGE_DELAY = 500
LOCATION_CHECK_DELAY = 5000
def initialize(object, vision, gun)
# ...
@stuck_state = TankStuckState.new(object, vision, gun)
@navigating_state = TankNavigatingState.new(object, vision)
set_state(@roaming_state)
end
# ...
def choose_state
unless @vision.can_go_forward?
unless @current_state == @stuck_state
set_state(@navigating_state)
end
end
# Keep unstucking itself for a while
change_delay = STATE_CHANGE_DELAY
if @current_state == @stuck_state
change_delay *= 5
end
now = Gosu.milliseconds
return unless now - @last_state_change > change_delay
if @last_location_update.nil?
@last_location_update = now
@last_location = @object.location
end
if now - @last_location_update > LOCATION_CHECK_DELAY
puts "checkin location"
unless @last_location.nil? || @current_state.waiting?
if Utils.distance_between(*@last_location, *@object.location) < 20
set_state(@stuck_state)
@stuck_state.stuck_at = @object.location
return
end
end
@last_location_update = now
@last_location = @object.location
end
# ...
end
# ...
end
What this does is automatically change state to navigating when tank is about to hit an obstacle.
It also tracks tank location, and if tank hasn’t moved 20 pixels away from it’s original direction
for 5 seconds, it enters TankStuckState, which deliberately tries to navigate away from the
stock_at spot.
AI navigation has just got significantly better, and it didn’t take that many changes.