Position Combinations
A two digit code is used to represent the positions of both arms as follows:
- the first digit, that on the left, represents the position of the left arm
- the second digit represents the positions of the right arm.
This is how positions using both arms are uniquely identified.
- 1-1 means both arms are in position 1.
- d-a means that the left arm is in position d and the right arm in position a.
- 4-b means that the left arm is in position 4 and the right arm is in position b.
Position Types (Four Quadrants)
Because there are two types of position for each arm, positions using both arms can be divided into four groups or quadrants.
- Both hands can be horizontal, (i.e. 1-1)
- both hands can be vertical (i.e. a-b),
- the left hand can be horizontal and the right hand vertical (i.e. 1-c)
- or vice versa (i.e. d-3.)
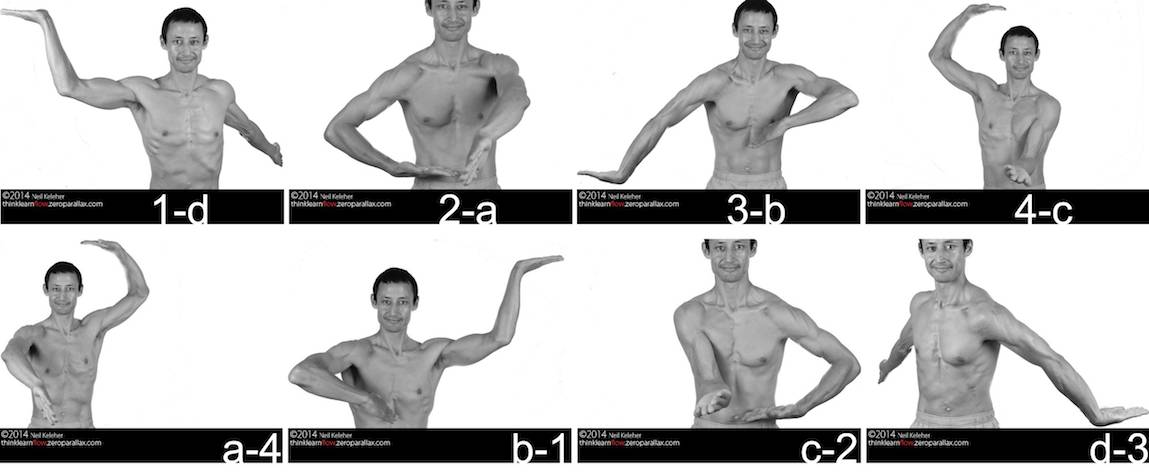
Here are examples positions from each quadrant.




For brevity I refer to these as Q1, Q2, Q3 and Q4 where Q stands for Quadrant.
When practicing (and learning) I tend to group Quadrant 1 and 2 positions together since both arms are in the same plane. Likewise I tend to group Quadrants 3 and 4 since both arms are in different planes.
Mirror the Pictures
When looking at pictures of the positions in this guide, imagine you are using a mirror. Even though my right hand is doing the positions, if you mirrored me, you’d use your left hand.
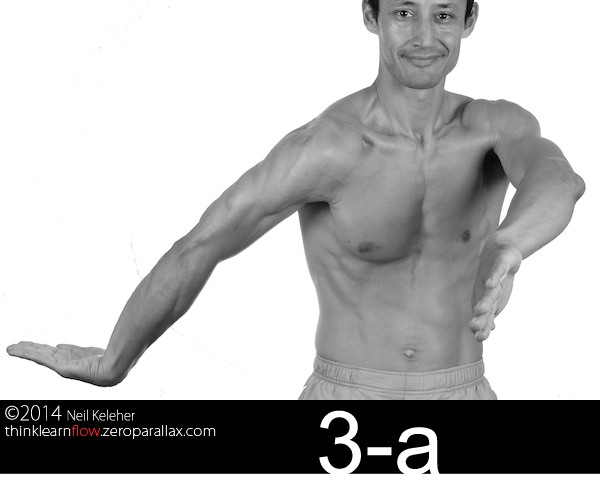
Because it is mirrored my right arm is in position 3 and my left arm is in position a. If you mirrored the picture and put your left arm in position 3 and your right arm in position a, then your arms would be in position 3-a.
Combined Position Relationships
In Dance of Shiva we can use movement terminology to describe the relationship between the hands. This is a tool we can use to make learning movements easier. We can notice changes (or a lack of change) in the relationship between the hands as they shift positions.
Say you are learning the F-B move. You want to practice this sequence:
- 1-1, 2-4, 3-3, 4-2, 1-1.
You note that the first and third positions relate the arms via a zero move. The second and third positions relate the arms via a transquarter move. If you already understand the transquarter move you can use this understanding to make learning the f-b move easier.
- Starting at position 1-1: move the left hand forward from positions 1 to position 2. You know the right relates via a transquarter. The transquarter of 2 is 4 so you move the right hand to 4. The arms are now in position 2-4.
- From 2-4: move the left hand Forwards from 2 to 3. You know that a zero from 3 is 3, so then you move the right hand to 3. The arms are in position 3-3.
- From 3-3: move the left hand Forwards from 3 to 4. You know the transquarter of 4 is 2 so then you move the right hand to 2. The arms are in position 4-2.
- From 4-2: move the left hand Forwards from 4 to 1. You know the zero of 1 is 1 and so you move the right hand to 1 and you are back at the beginning again.
Then you repeat a few more times to the point (ideally) where you can move both hands at the same time. Eventually you reach the point where you no longer have to think about how the hands relate in order to move them. You can do them without thinking. That is when you can focus on flowing.
However, should you need to you can always call up on this “reference” system again whenever you need it.
I’ve grouped positions that share a relationship below. The first four sets consist of Q1 and Q2 positions. The last four sets consist of Q3 and Q4 positions.
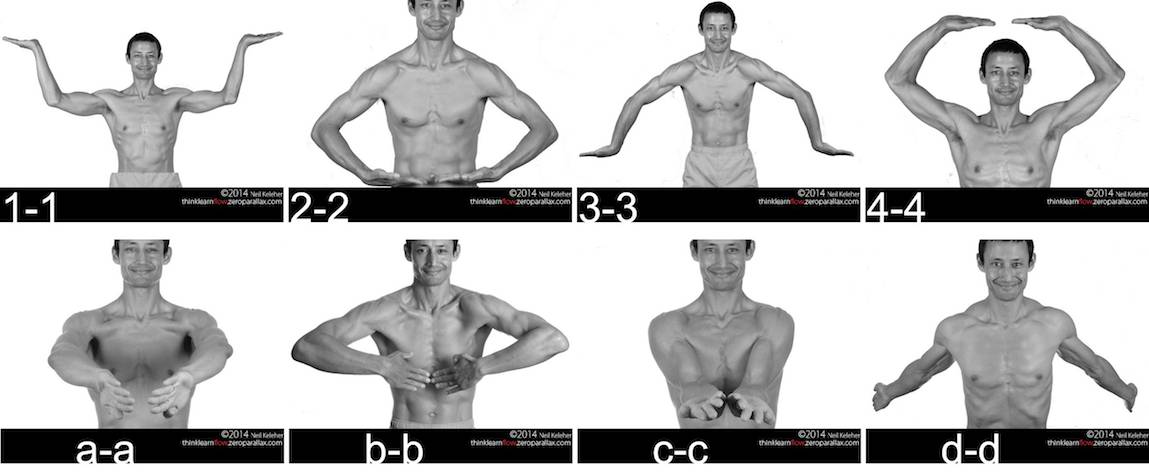
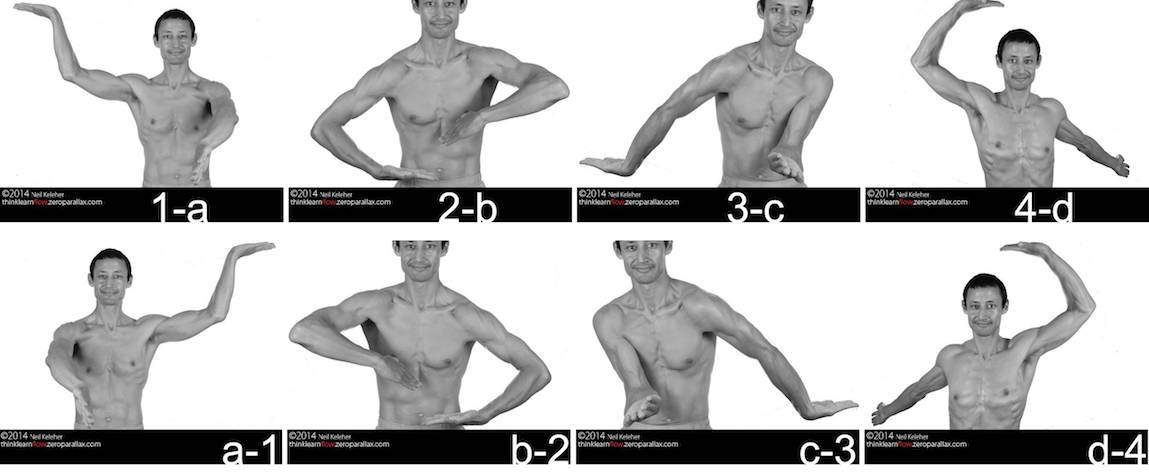
Zero Related Hand Positions
Here are the 8 positions where the right arm relates to the left via a zero move. In these positions (below) the right hand is in the same position as the left hand.
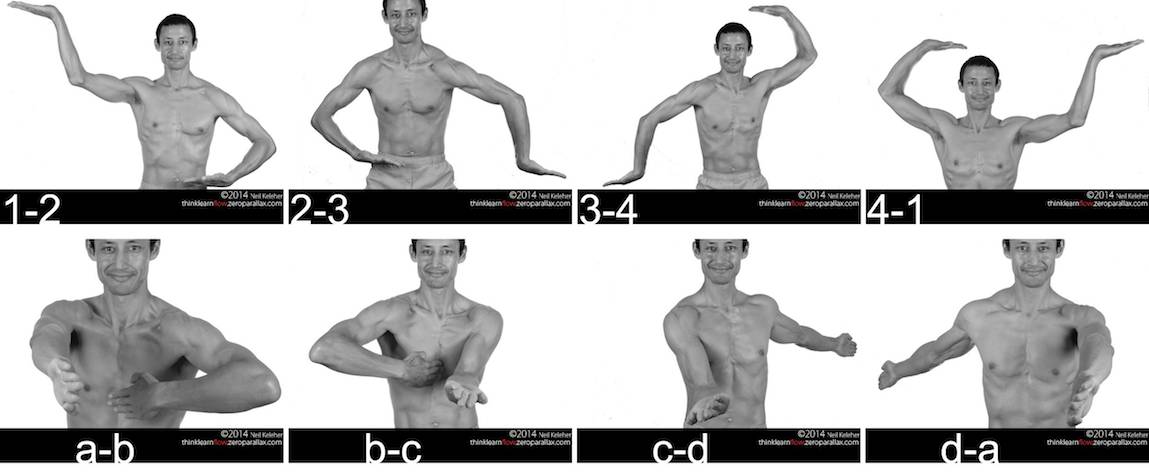
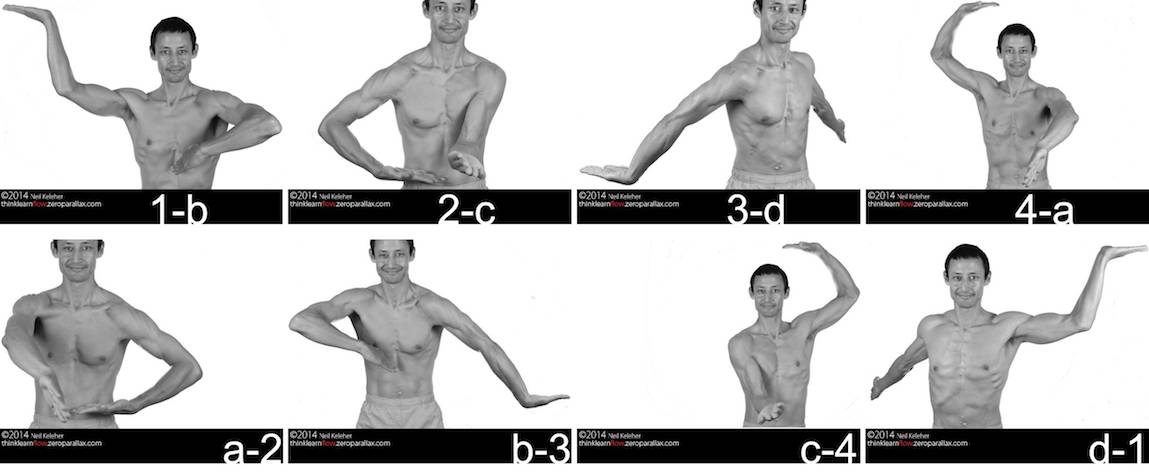
Forward Related Hand Positions
These are the positions (below) in which the right arms relates via a forward move. Or you could just think of the right hand as being one position ahead of the left hand.
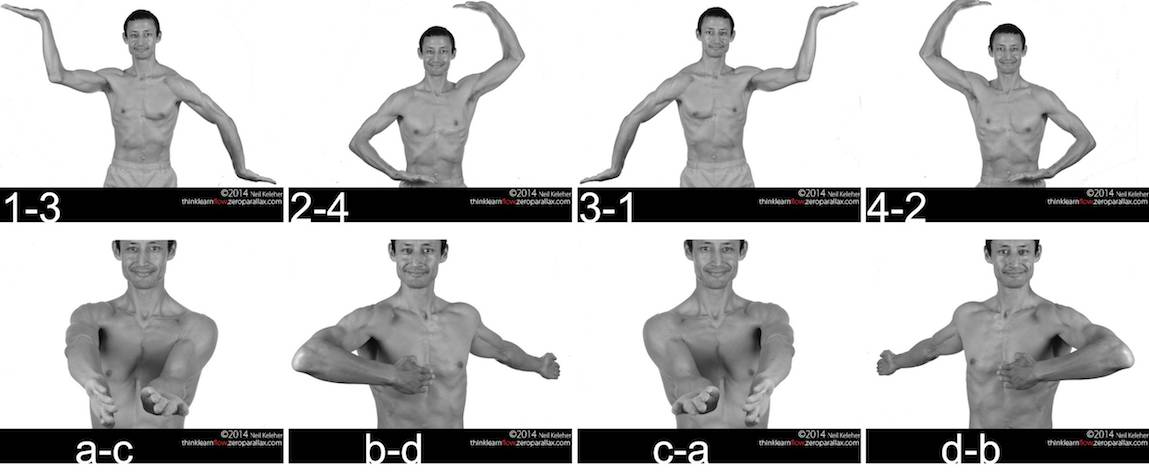
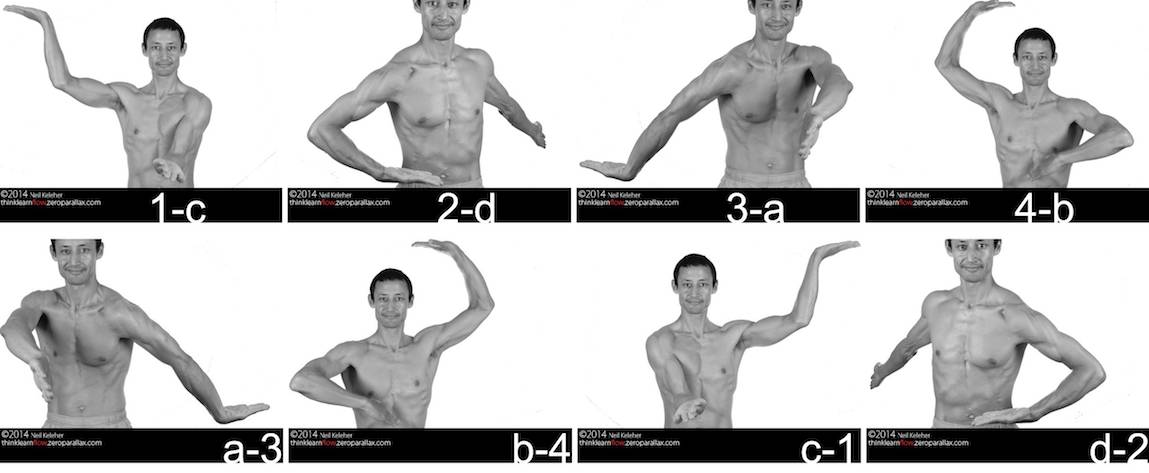
Transquarter Related Hand Positions
These are the 8 positions (below) in which the right arm relates to the left via a transquarter move. This means the right hand is two positions ahead of the left hand.
Backward Related Hand Positions
These are the 8 positions (below) in which the right arm relates to the left via a backward move. The right hand is three positions ahead (or one position behind) the left hand.
Note that in all of the cases above both hands are in the same plane. These are all Q1 and Q2 positions.
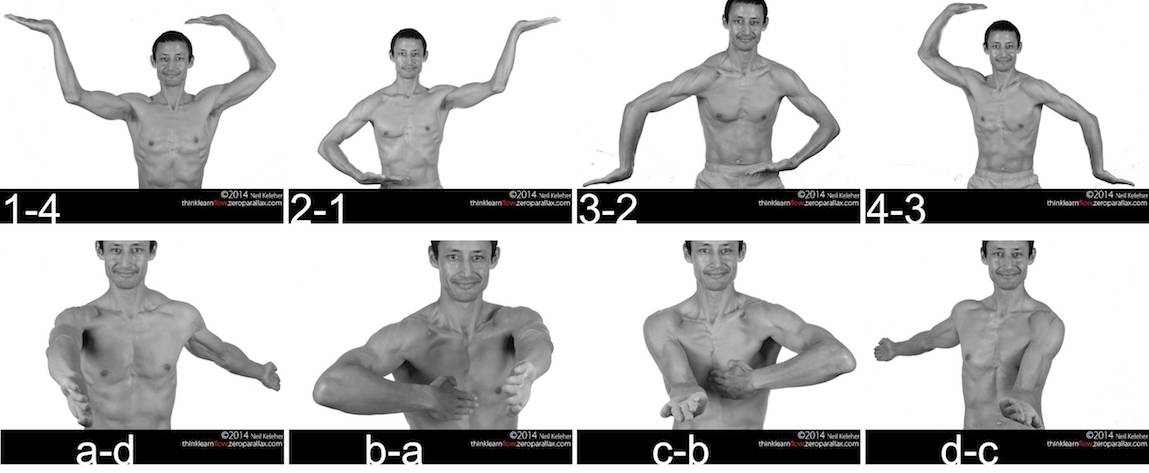
Change Related Arm Positions
These are the 8 positions (below) where the right arm relates to the left via a Change move.
ChangeForward Related Arm Positions
In these positions (below) the right arm relates to the left via a changeforward move.
ChangeTransquarter Related Arm Positions
These are the 8 positions (below) in which the right arm relates to the left via a changetransquarter move.
ChangeBackward Related Arm Positions
Below the right arm relates to the left via a changebackwards move.
Memory Aids
When doing movements with both hands we can notice how the relationship between hands changes or doesn’t change depending on the movement being done.